

斯坦福團隊新作:喊話就能指導機器人,任務成功率暴增(斯坦福機器人介紹)
克雷西 發自 凹非寺
量子位 | 公眾號 QbitAI
斯坦福的ALOHA家務機器人團隊,發布了最新研究成果——
項目名為Yell At Your Robot(簡稱YAY),有了它,機器人的“翻車”動作,只要喊句話就能糾正了!
而且機器人可以隨著人類的喊話動態提升動作水平、即時調整策略,并根據反饋持續自我改進。

比如在這個場景中,機器人沒能完成系統設定的“把海綿放入袋子”的任務。
這時研究者直接朝它喊話,“用海綿把袋子撐得再開一些”,之后就一下子成功了。
而且,這些糾正的指令還會被系統記錄下來,成為訓練數據,用于進一步提高機器人的后續表現。
有網友看了說,既然已經能朝著機器人喊話了,那汽車是不是也快點安排上,還在線點名特斯拉和其自動駕駛軟件總監Ashok Elluswamy。
成果發布后,前谷歌機器人高級研究員Eric Jang,前DeepMind研究員、斯坦福客座教授Karol Hausman等一眾大佬也紛紛表示了肯定和贊許。
那么,用喊話調整的機器人,都能實現什么樣的動作呢?
喊話就能發號施令
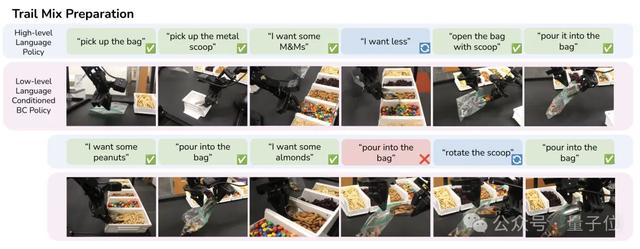
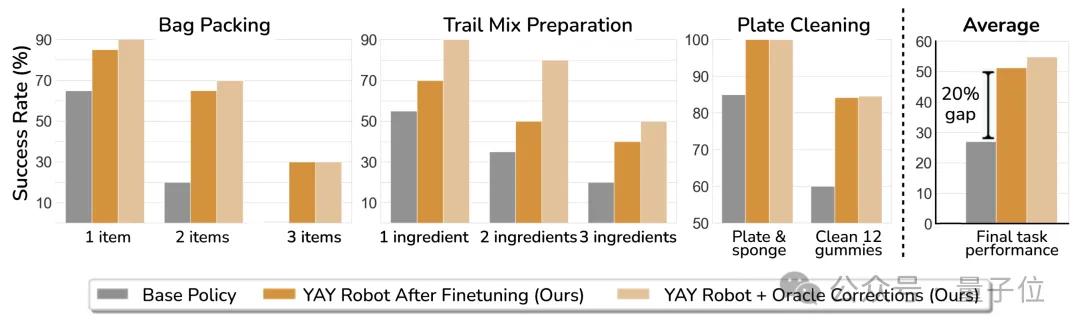
利用YAY技術調教后,機器人以更高的成功率挑戰了物品裝袋、水果混合和洗盤子這三項復雜任務。
這三種任務的特點是都需要兩只手分別完成不同的動作,其中一只手要穩定地拿住容器并根據需要調整姿態,另一只手則需要準確定位目標位置并完成指令,而且過程中還涉及海綿這種軟性物體,拿捏的力度也是一門學問。
以打包裝袋這個任務為例,機器人在全自主執行的過程中會遇到各種各樣的困難,但通過喊話就能見招拆招。
只見機器人在將裝袋的過程中不小心把海綿掉落了下來,然后便無法再次撿起。
這時,開發者直接朝它喊話,口令就是簡單的“往我這邊挪一挪,然后往左”。
當按照指令做出動作后,第一次還是沒成功,但機器人記住了“往左”這個指令,再次左移之后便成功把海綿撿起來了。

但緊接著就出現了新的困難——袋子的口被卡住了。
這時只要告訴它再把袋子打開一點點,機器人就“心領神會”,調整出了一系列后續動作,并最終成功完成任務。
而且不只是能糾正錯誤,任務的細節也能通過喊話實時調整,比如在裝糖的任務中,開發者覺得機器人拿的糖有點多了,只要喊出“少一點”,機器人就會將一部分糖果倒回盒子。
進一步地,人類發出的這些指令還會被系統記錄并用作微調,以提高機器人的后續表現。
比如在刷盤子這項任務中,經過微調之后的機器人清潔力度更強,范圍也變大了。
統計數據表明,機器人在經歷這種微調之后,平均任務成功率提高了20%,如果繼續加入喊話指令還能繼續提高。
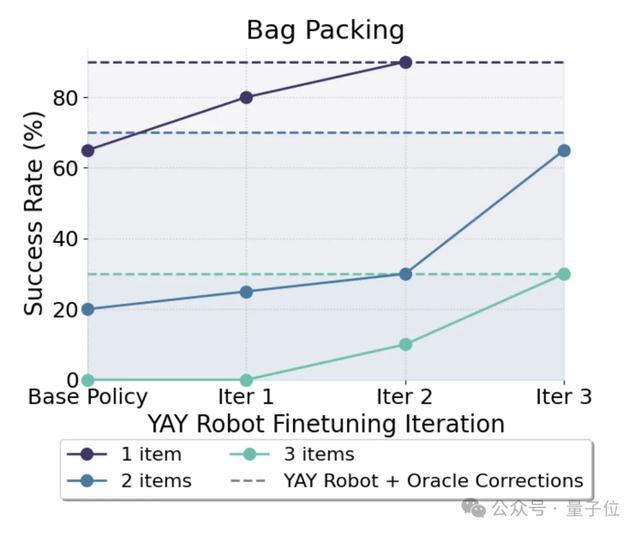
而且這樣的指令-微調過程可以迭代進行,每迭代一次機器人的表現都能有所提升。
那么,YAY具體是如何實現的呢?
人類教誨“銘記在心”
架構上,整個YAY系統主要由高級策略和低級策略這兩個部分組成。
其中高級策略負責生成指導低級策略的語言指令,低級策略則用于執行具體動作。
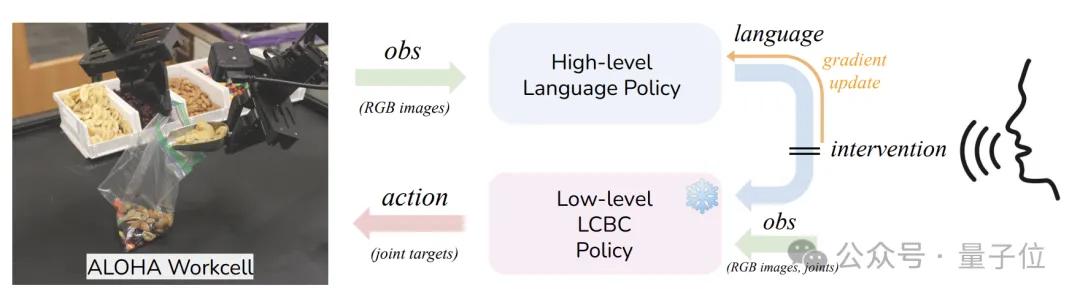
具體來說,高級策略將攝像頭捕捉到的視覺信息編碼,與相關知識結合,然后由Transformer生成包含當前動作描述、未來動作預測等內容的指令。
而低級策略接收到語言指令后,會解析這些指令中的關鍵詞,并映射到機器人關節的目標位置或運動軌跡。
同時,YAY系統引入了實時的語言糾正機制,人類的口頭命令優先級最高——經識別后,直接傳遞給低級策略用于執行。
且在這個過程中命令會被系統記錄并用于微調高級策略——通過學習人類提供的糾正性反饋,逐漸減少對即時口頭糾正的依賴,從而提高長期任務的自主成功率。
在完成基礎訓練并已經在真實環境中部署后,系統仍然可以繼續收集指令信息,不斷地從反饋中學習并進行自我改進。
作者簡介
本項目的第一作者是斯坦福大學的學生研究員Lucy X. Shi,2019年畢業于人大附中后進入南加州大學就讀計算機科學專業。
其間,Lucy曾到英偉達實習研究多模態大模型,并曾與知名AI學者Jim Fan博士合作。
她的論文曾連續兩年被機器人頂會CoRL收錄,還入選過NeurIPS,本人還被DeepMind邀請發表過演講。
Lucy的導師Chelsea Finn是斯坦福計算機科學和電氣工程系助理教授,谷歌學術論文引用數超4.7萬,此前還在Google Brain工作過一段時間。
包括本項目在內,在ALOHA團隊發表的一系列論文當中,Finn總是作為通訊作者出現。
此外,ALOHA團隊的Tony Z. Zhao、Sergey Levine等研究人員,也是本文的共同作者。
論文地址:
https://arxiv.org/abs/2403.12910
— 完 —
量子位 QbitAI · 頭條號簽約
關注我們,第一時間獲知前沿科技動態
